카드뉴스









SWC, RTE, BSW 구조: AUTOSAR를 처음 볼 때 필요한 큰 그림를 검색했다면 먼저 봐야 할 기준
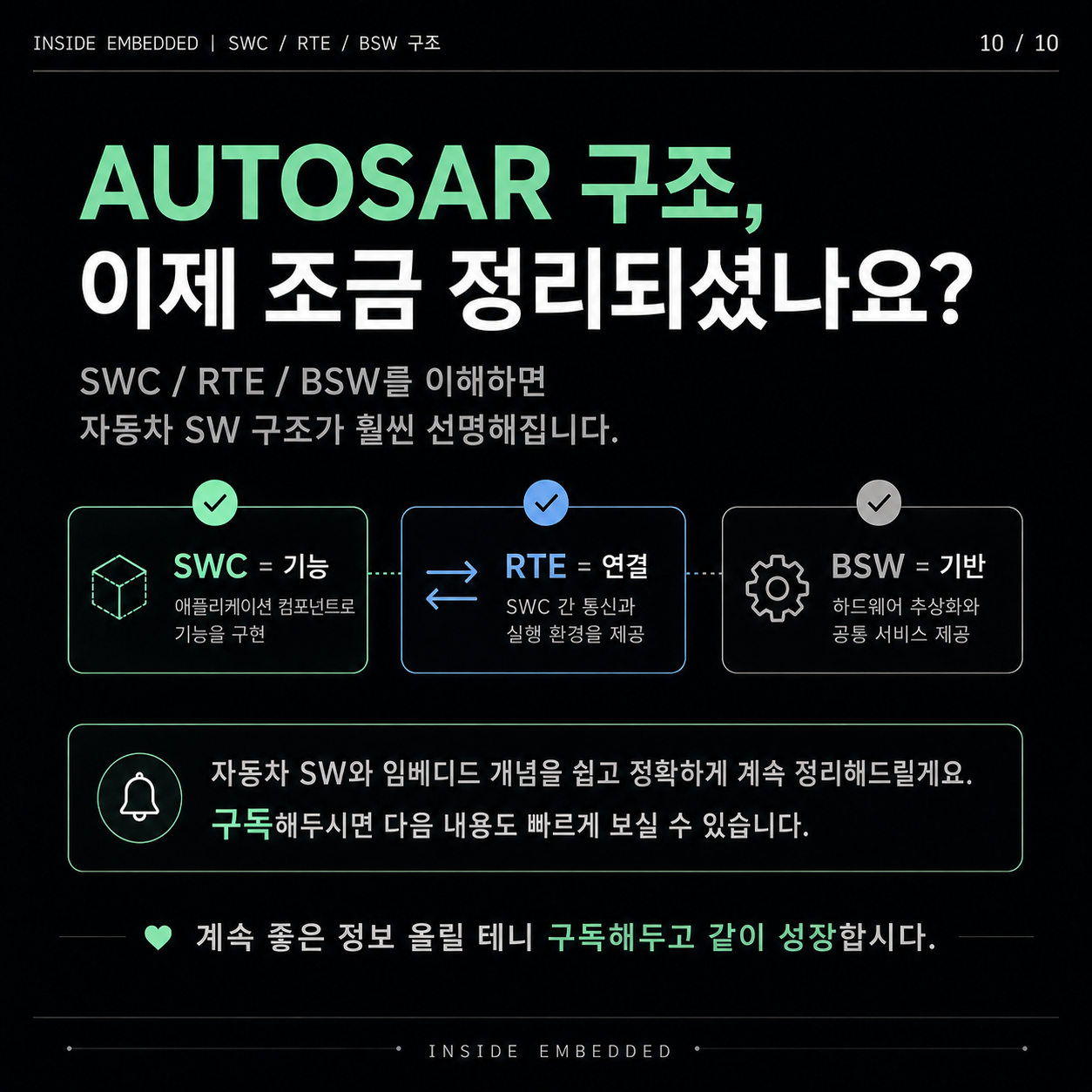
SWC, RTE, BSW 구조는 자동차 소프트웨어를 역할별로 분리해서 보는 방식입니다. AUTOSAR를 처음 보면 약어가 너무 많아 보이지만, 큰 틀은 단순합니다. 기능 로직을 담는 SWC, SWC와 아래 계층을 이어주는 RTE, 하드웨어와 통신·진단 같은 공통 기능을 담당하는 BSW로 나눠 보는 것입니다. 이 주제는 단어 뜻만 외우면 금방 흐려지기 때문에 SWC, RTE, BSW 같은 기준을 실제 업무 흐름과 함께 보는 편이 좋습니다.
먼저 구분할 기준
SWC는 ‘무슨 기능을 할 것인가’에 가깝고, BSW는 ‘ECU에서 그 기능이 동작하려면 어떤 기반이 필요한가’에 가깝습니다. RTE는 두 영역을 직접 엮지 않고 약속된 인터페이스로 연결합니다. 처음 공부할 때는 용어를 한꺼번에 외우기보다 어디에서 입력이 생기고, 누가 판단하며, 어떤 산출물로 남는지 따라가면 이해가 빨라집니다.
SWC, RTE, BSW, AUTOSAR를 검색하는 사람이라면 대부분 ‘이게 정확히 무슨 뜻인가’와 ‘실제로 어디에 쓰이나’를 동시에 궁금해합니다. 그래서 개념 설명만 읽고 끝내기보다 입력 조건, 제한 조건, 결과 확인 방법을 같이 적어두는 것이 좋습니다. 이렇게 정리하면 같은 내용을 면접, 포트폴리오, 프로젝트 회고에 다시 사용할 수 있습니다.
실무에서 확인할 것
이 구조가 중요한 이유는 변경 범위를 줄이기 위해서입니다. 센서 입력 방식이나 통신 스택이 바뀌어도 애플리케이션 로직 전체를 다시 짜지 않도록 계층을 분리합니다. 대신 인터페이스 정의가 흐리면 디버깅이 어려워집니다. 특히 전기전자와 임베디드 분야는 문서, 코드, 회로, 측정 결과가 따로 놀면 문제가 늦게 발견됩니다. 작은 기능이라도 확인 순서를 기록하는 습관이 중요합니다.
문제가 생겼을 때는 한 번에 결론을 내리지 말고 조건을 쪼개야 합니다. 사양이 잘못된 것인지, 구현이 빠진 것인지, 테스트 조건이 다른 것인지, 측정 방법이 흔들린 것인지 나누어 보면 원인이 좁혀집니다. 이 과정은 초보자에게 느리게 보이지만 실제 프로젝트에서는 가장 시간을 아끼는 방식입니다.
처음 공부할 때 순서
처음에는 포트, 데이터 타입, runnable 같은 단어를 SWC 안에서 먼저 보고, 그 다음 RTE가 어떤 호출 형태를 만들어주는지 보면 좋습니다. BSW는 MCAL, ECU abstraction, service layer처럼 하드웨어와 공통 서비스를 나누어 훑으면 충분합니다. 개념을 읽은 뒤에는 예제를 하나 정해 직접 손으로 바꿔보는 것이 좋습니다. 설정값을 바꾸고 결과를 비교하면 책에서 보던 용어가 실제 판단 기준으로 바뀝니다.
처음부터 완성도 높은 결과물을 만들려고 하면 부담이 커집니다. 대신 한 가지 기능을 정하고 정상 조건, 경계 조건, 오류 조건을 나눠 확인해보세요. 표나 짧은 로그로 남겨도 충분합니다. 중요한 것은 멋진 문장보다 재현 가능한 기록입니다.
포트폴리오와 면접에서 말할 포인트
면접에서 이 구조를 말할 때는 ‘AUTOSAR를 압니다’보다 기능 로직과 하드웨어 의존성을 분리하려는 목적을 설명하는 편이 낫습니다. 작은 예제로 LED 제어나 CAN 송신을 SWC와 BSW 관점으로 나눠보면 말이 구체화됩니다. 결국 좋은 설명은 어려운 단어를 많이 쓰는 것이 아니라, 내가 어떤 조건을 보고 어떤 선택을 했는지 보여주는 데서 나옵니다.
카드뉴스는 큰 그림을 빠르게 잡기 위한 자료이고, 아래 본문은 검색으로 들어온 사람이 한 번 더 판단할 수 있도록 만든 보충 설명입니다. 관련 주제를 이어서 볼 때도 용어 암기보다 실제 입력, 처리, 출력, 검증 흐름을 기준으로 연결해보면 학습 방향이 더 분명해집니다.


